
Complex machines such as light sources require precise and highly repeatable motion systems, a typical beamline makes use of over than forty motors that are used to position its optical elements (mirrors, gratings, crystals, slits etc.) as well as samples and detectors.
This precise motion is implemented using motion control systems. A typical motion control system, is made up of 5 main elements:
- Control Software
- Motion Controller
- Driver
- Motor
- Position Encoder
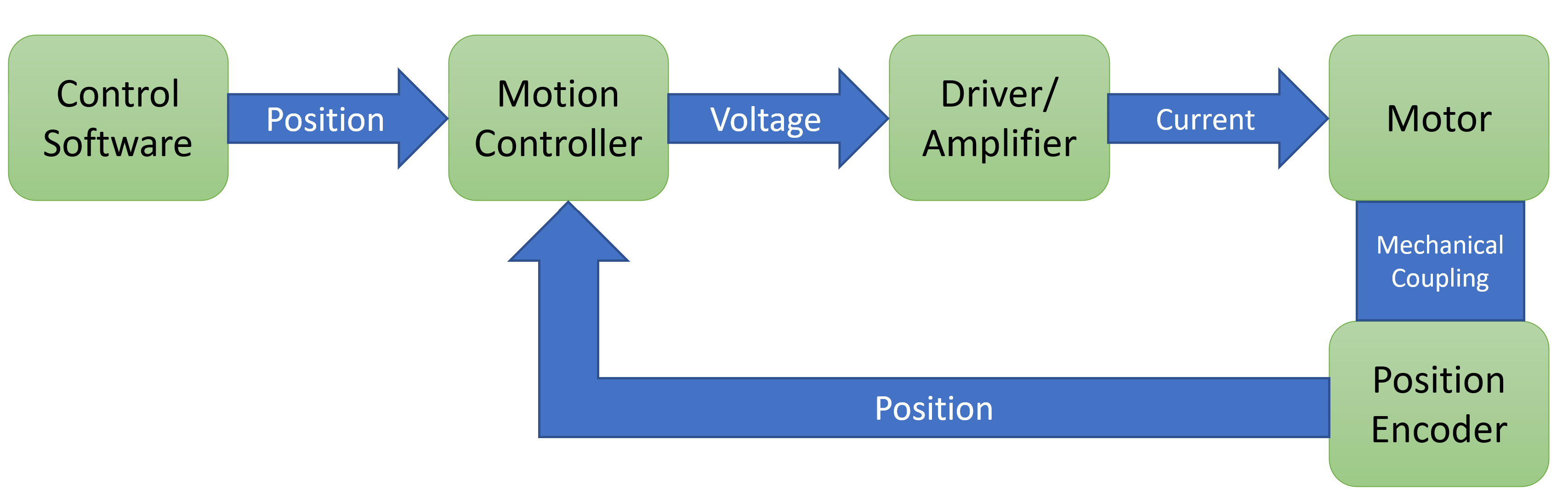
- Control Software
Is a dedicated software application that is used to command a target position and motion control profiles.
SESAME Use EPICS driver developed by Dr. Mark Clift - Motion controller
The motion controller acts as brain of the of the system by taking the desired target positions and motion profiles and creating the trajectories for the motors to follow, but outputting a ±10V voltage signals for servo motors, or step and direction pulses for stepper motors.
SESAME Uses Galil DMC-21x3 & DMC-41x3 as standard motion controllers. - Driver/Amplifiers
The drivers are devices that take the commands from the controller and generate the current required to drive or turn the motor.
SESAME uses Applied Motion ST5-S drivers as standard stepper motors drivers. - Motor
Motors are devices that turn electrical energy into mechanical energy and produce the torque required to move to the desired target position. - Position Encoder
A position encoder device is not required for some motion control applications (such as controlling stepper motors) but is vital for servo motors. The position encoder feeds back the current position to the controller.
Yazeed AL MOMANI
Supervisor Electronics and Instrumentation Engineer
Email: yazeed.momani@sesame.org.jo
Work Tel: +962 5 351 1348 (Ext. 289)
Farouq AL OMARI
Principal Electronic and Instrumentation Technician
Email: Farouq.alomari@sesame.org.jo
Work Tel: +962 5 3511348 (Ext 234)
Hussam AL-MOHAMMAD
Electrical Technician
Email: hussam.almohammad@sesame.org.jo
Work Tel: +962 5 3511348 (Ext 234)